
Spotted: Ocean waste has become a serious problem. The ocean is filled with an estimated 5.25 trillion pieces of plastic debris, equating to 46,000 pieces per square mile. To hopefully rid the waters of this problem, roboticists at the Max Planck Institute for Intelligent Systems in Stuttgart (MPI-IS) have developed an underwater robot inspired by jellyfish to collect waste from the bottom of the ocean.
Other scientists have thought to combat ocean waste using robots, but existing underwater devices tend to be inconveniently bulky and rigid, which means they cannot explore complex environments. Often, they are also noisy because of their electrical motors or hydraulic pumps.
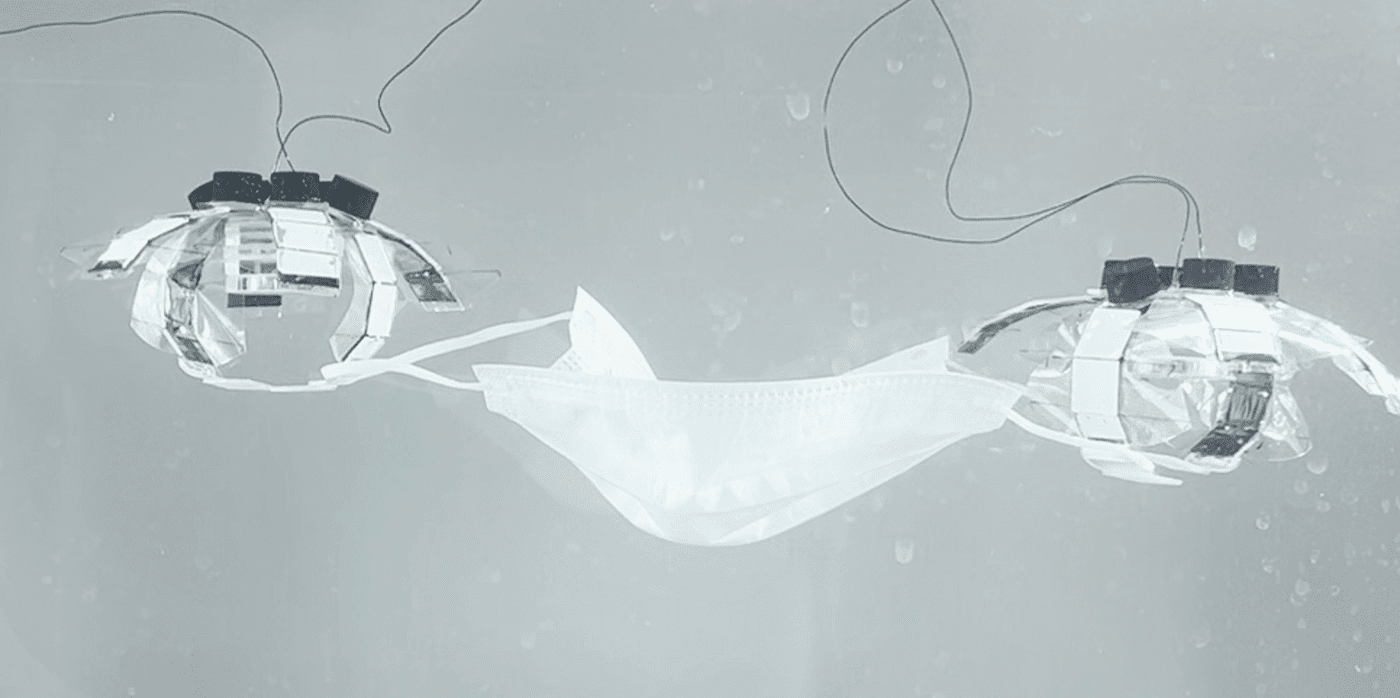
Instead, the MPI-IS team took inspiration from the ocean and created the ‘Jellyfish-Bot’ – a versatile, energy-efficient, virtually noise-free robot that is just the size of a hand. It can also operate alone or with several others in combination. In the Jellyfish-Bot, the team decided to mimic a jellyfish’s ability to swim upwards and trap objects along its path. This function helps the robot collect waste particles that can then be transported to the surface, where they can be recycled. The robot is even able to collect fragile biological samples like fish eggs.
Compared to similar inventions, the Jellyfish-Bot works faster – up to 6.1 centimetres per second, and only requires a low power input of around 100 megawatts. Crucially, if the robot breaks or is torn apart in the water, the polymer material is safe for both humans and fish.
The team is currently working on making the Jellyfish-Bot completely wireless, and has already incorporated the necessary parts to enable wireless manipulation.
The Jellyfish-Bot is not the only robot tackling ocean waste. Springwise has also spotted the SeaClear system, which uses a combination of robotics and machine learning to locate and remove marine debris.
Written By: Anam Alam